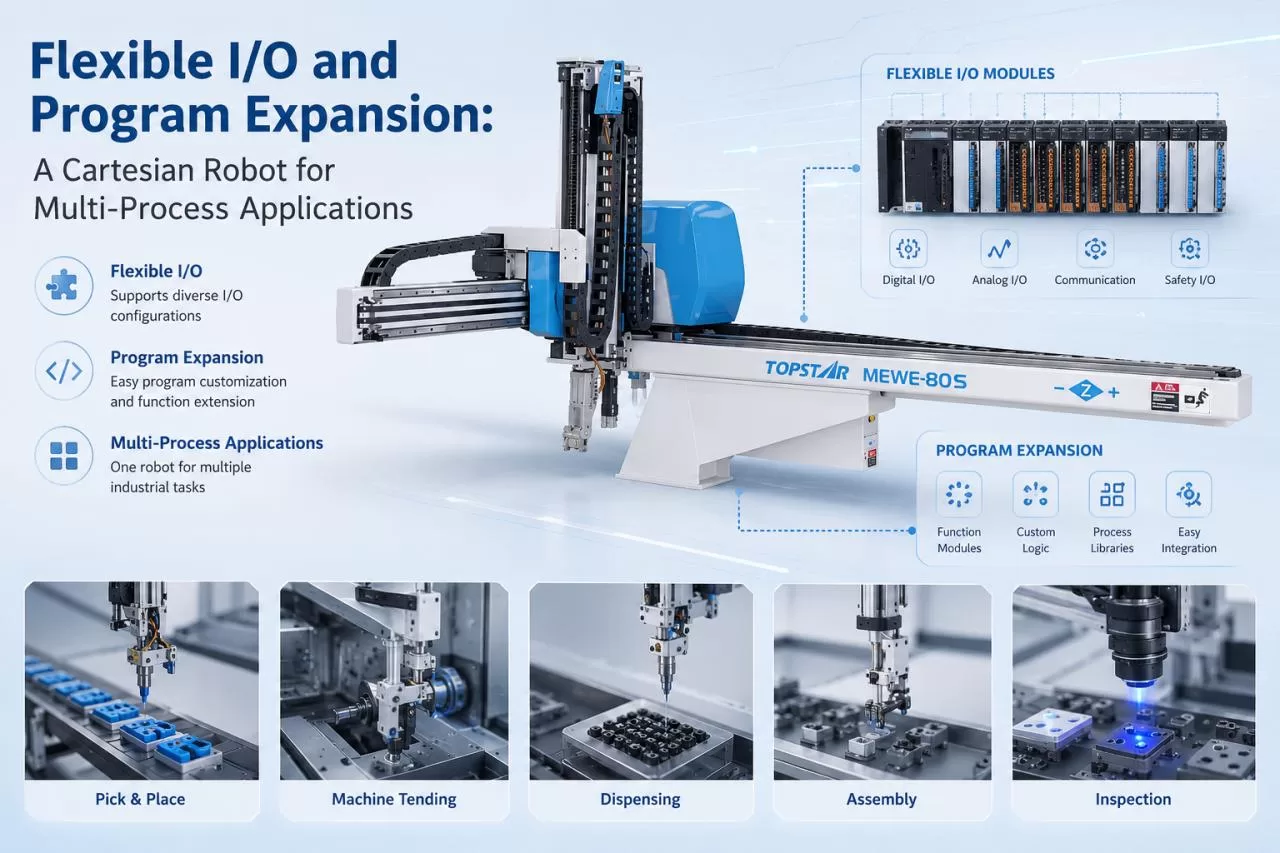
Traditional Cartesian robots can perform many standard picking tasks, but once a production line begins using custom fixtures, multiple pick-up points, multiple gripping points, or multi-process operations, their systemic limitations become apparent, rendering them unsuitable for non-standard fixtures and multi-process applications. Topstar’s Cartesian robot addresses this issue in two ways: Therefore, during the R&D process,… Continue reading Flexible I/O and Program Expansion: A Cartesian Robot for Multi-Process Applications