Flexible I/O and Program Expansion: A Cartesian Robot for Multi-Process Applications
2026/05/06 By le zhan
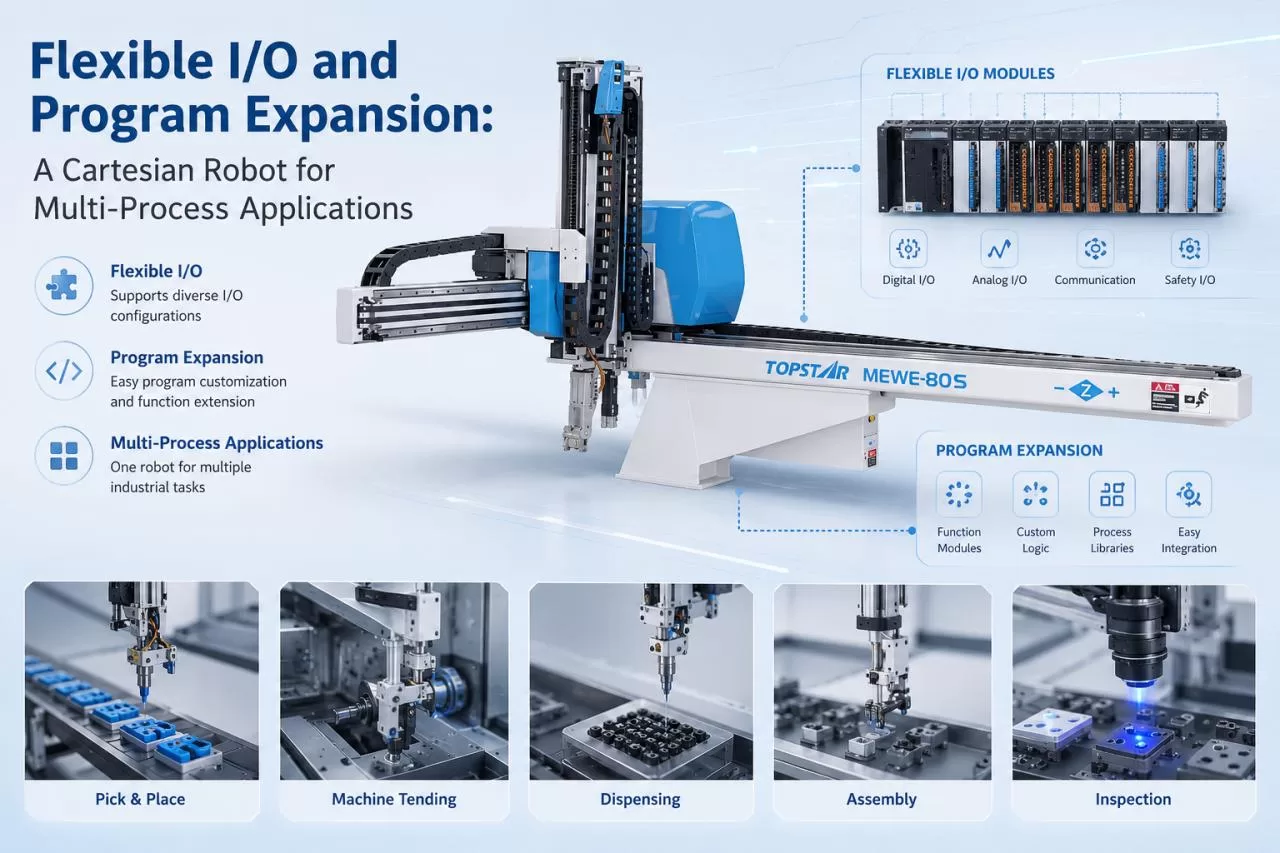
Traditional Cartesian robots can perform many standard picking tasks, but once a production line begins using custom fixtures, multiple pick-up points, multiple gripping points, or multi-process operations, their systemic limitations become apparent, rendering them unsuitable for non-standard fixtures and multi-process applications. Topstar’s Cartesian robot addresses this issue in two ways:
- Flexible I/O and program expansion capabilities
- Configurable with up to 8 suction channels and 8 gripping channels, making them ideal for non-standard fixtures and multi-process applications.
Therefore, during the R&D process, we not only focus on motion performance but also on enhancing the robot’s expandability, communication capabilities, and adaptability to ever-changing application scenarios.
The Challenges of the Traditional Cartesian Robot
The issue with traditional Cartesian robots for injection molding lies in their limitations, which typically manifest in three areas:
Application scope
Flexibility
Fixture compatibility.
First, if a robot supports only limited functions, it struggles to switch between different process steps. Second, if its control system is overly rigid, it becomes difficult to add new signals or logic rules. Third, if the robot is incompatible with custom fixtures, manufacturers must redesign them for production.
These issues consume both time and money. Factories may need to modify fixtures, readjust production processes, or even replace the robot. In such cases, the real issue lies not merely in the mechanical structure itself, but in the need to consider scalability and flexibility from the initial design phase.
How can a Cartesian robot achieve scalability and flexibility?
We use the Cartesian robot’s flexible I/O ports and logic programming as the foundation of its control system, giving it the ability to flexibly expand its programming capabilities. This allows the robot to receive more input and output signals and execute more complex logic instructions. This flexibility enables them to be applied in situations where the production line includes different fixtures, different end-effectors, or different process steps.
In many injection molding applications, Cartesian robots must handle multiple actions within a single cycle. They may need to receive a mold-opening signal, grasp a part, initiate mold suction, confirm the grip, transfer the product, and then trigger the subsequent demolding process. If the logic system is too limited, coordinating these actions becomes difficult. Topstar’s Cartesian robot, with its flexible I/O and program expansion capabilities, provides ample capacity to execute these steps seamlessly.
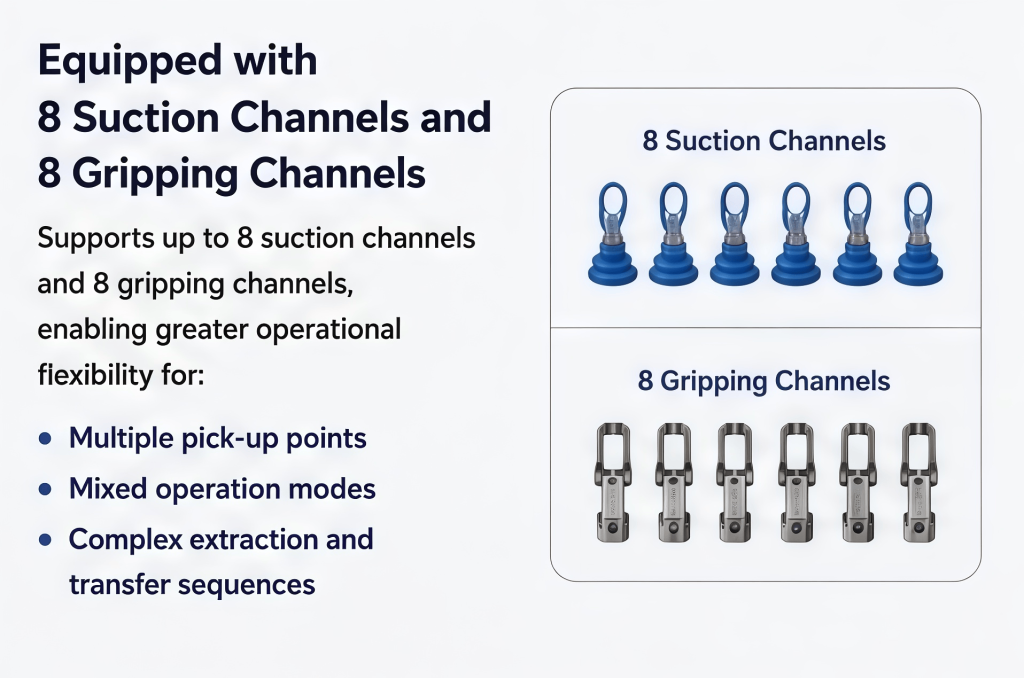
Equipped with 8 suction channels and 8 gripping channels
During the production process, parts require suction during extraction, mechanical gripping during transfer, and different release methods upon reaching their destination.
Topstar Cartesian robots support up to 8 suction channels and 8 gripping channels. This expandability directly enhances the robot’s operational flexibility. It enables support for multiple pick-up points, mixed operation modes, or more complex extraction and transfer sequences within a single system.
Injection molding Cartesian robots with limited channels may require additional external equipment or struggle to coordinate these actions efficiently. By directly supporting more channels, our Cartesian robots simplify processes, improve integration, and are ideally suited for custom fixtures and multi-process applications.
The Importance of Channel Expansion for Custom Fixtures
Custom fixtures increase the complexity of operational workflows. They may alter gripping positions, the number of pick-up points, or the sequence of movements. Cartesian coordinate robots with insufficient channels or limited logical flexibility may struggle to support these changes efficiently. Leveraging the scalable architecture of Cartesian coordinate robots effectively addresses this issue, making the process much easier. They can be configured to match the fixture without requiring the factory to redesign around the machine. This reduces engineering effort and shortens commissioning time. When the robot’s logic consistently aligns with the fixture’s actual behavior, process reliability also improves.
Making Multi-Process Applications Easier to Manage
Production lines typically involve multiple processes, not just part retrieval. Cartesian coordinate robots must perform operations such as lifting, moving, inspecting, sorting, or transferring parts in sequence. In such cases, they must support multi-process logic while maintaining stability and keeping programming complexity manageable.
Topstar’s flexible I/O and programming system enables Cartesian robots to perform these steps more naturally. By coordinating with conveyors, inspection stations, palletizing units, or custom downstream fixtures, they can directly manage more workflows, reducing operator setup time and ensuring a more stable production line operation.
Addressing Limited Application Scope and Low Flexibility/Scalability
Topstar’s Cartesian coordinate robots address the challenges of limited application scope and low flexibility/scalability through flexible I/O expansion, logic programming, and support for up to 8 suction cup channels and 8 gripping channels. These features make them ideal for custom grippers and multi-process workflows.
TRENDING POSTS
- How does a compact dehumidifying dryer achieve stable and reliable drying and dehumidification? 2026/05/06
- CHINAPLAS 2026 is Coming Soon! 2026/05/06
- New Year, New Beginnings: Topstar Robotics Delivers Heartfelt Service to Keep Customers Thriving! 2026/05/06
- TOPSTAR Global Open Day 2025: Humanoid Robot Debuts, Pioneering a New Decade of Intelligent Manufacturing 2026/05/06
HOT TOPIC
- .ervo motor-driven linear robots
- •
- 1.0 guangdong topstar technology co. ltd
- 1.0 topstar china
- 1.0 topstar robot
- 11
- 160℃ mold temperature controller
- 170 ton injection molding machine
- 2
- 21
- 220-ton injection molding machine
- 23
- 260 ton injection molding machine
- 3 axis robot
- 3 axis robots
- 3 in 1 Compact Dehumidifying Dryer
- 3-axis robot
- 3-axis robots
- 39
- 4-axis SCARA robot
- 41
- 460T injection molding machine
- 5-axis CNC machine
- 62
- 90 ton injection molding machine
- accuracy
- Air Chillers
- air-cooled chillers
- all electric injection molding machine
- all electric injection molding machines
- all-electric injection molding machine
- All-electric injection molding machines
- and overall production quality. Therefore
- AP-RubberPlas
- auto cooling system
- auto loader
- Auto Loaders
- automated injection molding machine
- Automation changed engineering
- automation of injection molding robots
- automotive parts injection molding
- Auxiliary Equipment
- auxiliary machine
- Bench Injection Molding Machine
- cabinet dryer
- Cabinet dryer manufacturers
- Cabinet dryers
- cartesian coordinate robot
- Cartesian Coordinate Robots
- Cartesian injection robot
- Cartesian robot
- Central Feeding System
- chiller
- CNC Drilling Machine
- CNC Drilling Machines
- cnc engraving machine manufacturer
- cnc laser cutting machine manufacturer
- CNC machine
- CNC Machine Center
- CNC Machine for Sale
- CNC Machine Manufacturing
- CNC Machine Tool
- CNC machine tool product
- CNC Machining Center
- CNC wood carving machine
- Compact Dehumidifying Dryer
- Cooling system
- Cross-Walking Single Axis Servo Cylinder Robot
- Cross-Walking Single-Axis Servo Cylinder Robot
- Cross-Walking Three-Axis/Five-Axis Servo Driven Robot
- cross-walking three-axis/five-axis servo-driven robot
- Dehumidifier Dryer
- Dehumidifying Dryer
- dehumidifying dryers
- delta parallel robot
- Desktop Injection Molding Machine
- Desktop injection molding machines
- Desktop Molding Machine
- desktop plastic injection machine
- Desktop Plastic Injection Molding Machine
- Digital Transformation
- direct clamp injection molding machine
- Direct clamp injection molding machines
- Dosing & mixing system
- Drilling Centers
- Drying and dehumidification system
- drying and dehumidifying equipment
- Drying and Dehumidifying System
- drying system
- effective and efficient. Cabinet dryers are also used in other industries where large quantities of material need to be dried
- efficient injection molding machine
- elbow hydraulic injection molding machines
- electric injection molding machine
- electric injection molding machines
- energy-efficient injection molding robot
- energy-efficient water chiller
- energy-efficient water chillers
- energy-saving injection molding machine
- etc. Among injection molding robots
- exhibition
- features of CNC machine
- Feeding And Conveying System
- Five Axis Machine Center
- Flexible Production Line
- Fully automatic injection molding machine
- Gathering Topstar
- giant injection molding machine
- GMU-600 5-Axis Machining Center
- Granulating & Recycling System
- granulator machine
- gravimetric blender
- Heavy duty injection molding machine
- High-precision electric molding machines
- high-precision plastic molding machines
- high-speed all electric injection molding machine
- high-speed electric injection molding machine
- High-Speed Packaging Injection Molding
- Honeycomb rotor dehumidifier
- hopper dryer
- Hopper Dryers
- horizontal injection molding machine
- Horizontal Injection Molding Machines
- Horizontal Injection Moulding Machine
- Horizontal Mixer manufacturer
- How The CNC Machine Works
- hybrid injection molding machine
- hydraulic injection molding machine
- Hydraulic Injection Molding Machines
- in this article
- Industrial AI
- Industrial Automation
- Industrial robot
- Industrial Robot Chinese brand
- industrial robot parts
- industrial robot supplier
- Industrial robots
- Industry Chain
- Injection Manipulator
- injection manipulator robot
- injection mold machines
- Injection molding
- Injection molding automation
- Injection Molding Automation Solution
- injection molding dryer
- Injection molding equipment
- injection molding hopper dryer
- Injection molding machine
- injection molding machine brand
- Injection Molding Machine Factory
- Injection Molding Machine Manufacture
- Injection molding machine manufacturer
- injection molding machine manufacturers
- Injection molding machine procurement
- injection molding machine robotic arm
- injection molding machine with a robot
- Injection molding machines
- injection molding material dehumidifying
- injection molding plant
- injection molding process
- Injection Molding Robot
- injection molding robot arm
- Injection molding robot automation
- Injection molding robotic arm
- injection molding robots
- injection molding whole plant
- injection moulding dryer
- Injection moulding machine
- injection moulding machines
- Injection Moulding Robots
- Injection Robot
- Injection robot arm
- Injection robot manufacturer
- Injection robot wholesale
- injection robots
- Intelligent Factory
- intelligent injection molding machines
- Intelligent Manufacturing
- intelligent mold temperature
- intelligent mold temperature controller
- Intelligent mould temperature controller
- intelligent whole plant solution
- InterPlas Thailand 2025
- Introducing Injection Robot
- It is the best choice for drying large quantities of material at once. Cabinetmakers use these machines because they are fast
- Large flow water type mold temperature controller
- large injection molding machine
- large injection molding machines
- Learn what industrial automation and robotics is
- linear robot
- linear robots
- low speed sound-proof granulator
- machine plastic molding
- make sure to add some! Improvements (2) Keyphrase in introduction: Your keyphrase or its synonyms appear in the first paragraph of the copy
- manipulator machine
- manufacturing
- Manufacturing Innovation
- medical grade injection molding machines
- Medical Injection Molding
- medical injection molding machine
- medical injection molding machines
- micro injection molding machine
- middle speed granulator
- Mini CNC machine manufacturers.
- mobile cover making machine
- Mold Temperature Control System
- mold temperature controller
- mold temperature controllers
- molding machine
- molding material Dehumidifying System
- mould temperature control system
- mould temperature controller
- mould temperature controller
- mould temperature controllers
- New electric injection molding machine
- nitrogen dryer manufacturer
- nitrogen dryer system manufacturer
- Oil type mold temperature controller
- Oil type mold temperature controllers
- open day
- optical component injection molding
- Outbound links: No outbound links appear in this page. Add some! Images: No images appear on this page. Add some! Internal links: No internal links appear in this page
- packaging injection molding
- Packaging Solutions
- PET Preform injection molding
- phone case maker machine
- phone case making machine
- phone cover making machine
- PID Control Mold Temperature Controller
- plastic auto loader
- plastic bottle making machine
- plastic bottle manufacturing
- plastic bucket making machine
- plastic bucket manufacturing
- Plastic chair making machine
- plastic dryer for injection molding
- plastic forming equipment
- Plastic Granulators
- plastic hopper dryer
- plastic injection machine
- plastic injection machines
- plastic injection molding
- Plastic injection molding equipment
- Plastic injection molding machine
- Plastic Injection Molding Machines
- plastic injection moulding machine
- plastic injection moulding machines
- plastic injection robot
- plastic molding
- Plastic Molding Industry
- Plastic Molding machine
- plastic molding machine 1
- Plastic Molding Machines
- plastic molding press
- plastic moulding machine
- plastic phone case making machine
- plastic-molding machine
- powerful granulator
- Powerful Type Sound-Proof Granulator
- precision injection molding
- precision injection molding machines
- production of plastic seats
- pure water mould temperature controller
- Robot injection molding
- robot injection molding machine
- robot manufacturing companies
- Robotic arm for injection molding machine
- robotic injection molding machines
- robotics in injection molding
- SCARA robot
- SCARA robots
- Screw dosers
- Service-oriented manufacturing
- Servo Cylinder Robot
- servo driven robot
- Servo Driven Robots
- servo injection molding machine
- servo injection robots
- servo motor-driven linear robots
- servo-driven 3-axis robot
- Servo-driven injection molding machine
- Servo-Driven Robot
- Setup of injection machine
- Silicone Injection Molding Machine
- six-axis industrial robot
- Smart Manufacturing
- soundproof granulator
- Sprue Picker
- Stainless Hopper Dryer
- Stainless Hopper Dryers
- star club
- swing arm robot
- take-out robot
- take-out robots
- Thailand 4.0
- the choice between servo-driven robots and hydraulic robots will have a certain impact on efficiency
- the most popular injection molding machine
- the type of injection molding robot
- TIC2000 Control System
- TMII injection molding machine
- toggle clamp injection molding machine
- Toggle Hydraulic Injection Molding Machines
- toggle injection molding machine
- Top 10 brands of injection robots
- Topstar
- Topstar Electric Injection Molding Machine InterPlas Thailand 2025 Smart Manufacturing Thailand 4.0
- Topstar Engineering
- Topstar Industrial Robots
- Topstar injection molding intelligent
- Topstar Scara Robots
- Useful Injection molding machine
- Vertical machining centers
- volumetric type blender
- Washing Machine Case Molding Solution
- water chiller
- water chillers
- water distributor
- water type mold temperature controller
- Water Type MoldTemperature Controller
- Water-cooled Mold Temperature Controller
- water-type mold temperature controller
- Water-Type Mould Temperature Controllers
- We often face choices when performing injection molding. We will choose the type of injection molding machine
- wholesale of injection molding machines
- x carve CNC
- 热门查询 点击次数 展示 排名 topstar