How does the control architecture of a cartesian coordinate robot optimize pick-and-place and tracking actions?
2026/05/11 By le zhan
Cartesian coordinate robot used in injection molding must perform part picking, placement, and motion tracking within extremely short cycles while adapting to constantly changing production conditions. The core of controlling these actions lies in the robot’s control architecture.
Our design philosophy revolves around a clear principle: “A Cartesian coordinate robot should not merely execute motion commands; it should translate process requirements into precise movements, minimize latency as much as possible, and achieve the highest repeatability.”
Therefore, we employ an integrated drive-control architecture, high-precision closed-loop control, real-time trajectory correction, and stable-response logic. This enables Cartesian coordinate robots to achieve ultra-high-speed command response, ensuring zero-delay execution of pick-and-place, trajectory tracking, and follow-motion operations.
Why does the control architecture determine the performance of pick-and-place operations?
When purchasing cartesian robots, customers typically focus first on travel range, payload capacity, or speed. While these parameters are certainly important, they do not directly influence the robot’s operational fluidity. In fact, the quality of a Cartesian robot’s motion begins within the control architecture itself. If command processing is slow, motion will lag; if the feedback loop is weak, motion will drift; and if the control logic is chaotic, the robot will hesitate at the very moment action is required.
This is because, in injection molding, robots typically operate within very narrow time windows. The mold opens, the part is removed, the robot moves into position, picks up the part, and then exits before the next cycle begins. Even the slightest delay in this process can reduce production efficiency or cause disruptions. Therefore, the control architecture must support instantaneous command execution and stable motion synchronization.
Cartesian Coordinate Robot with Integrated Drive Control Architecture
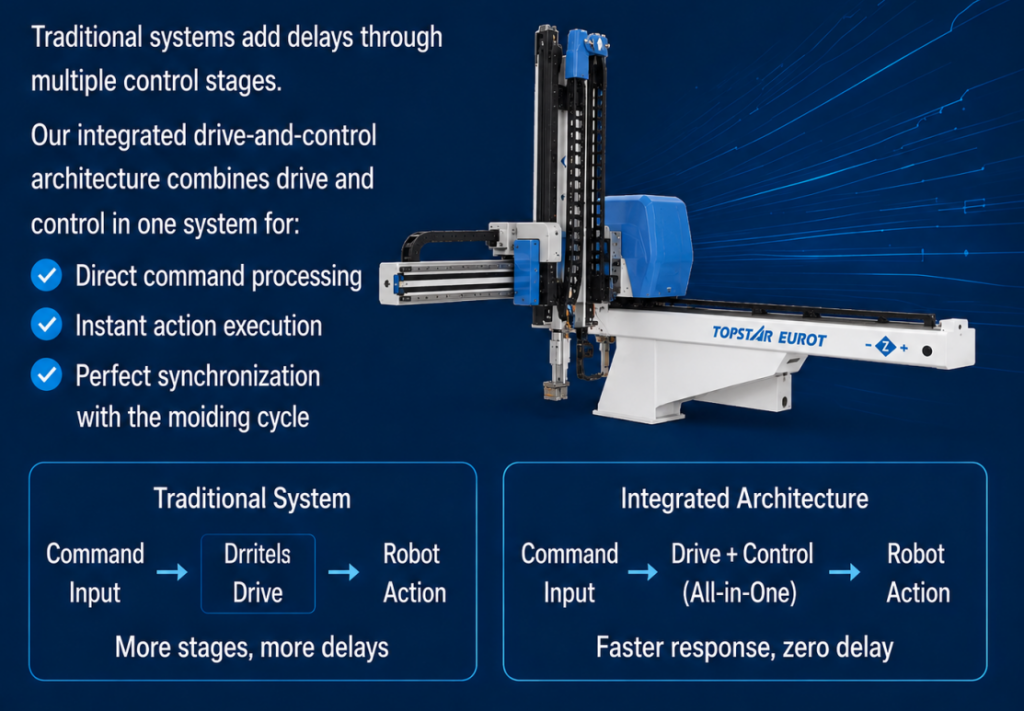
In traditional systems, commands must pass through multiple control stages before the robot actually moves, introducing delays. In high-speed automation applications, such delays pose risks. The robot may arrive too late, move too early, or fail to synchronize correctly with the mold. To address this, we have optimized our system by adopting an integrated drive-and-control architecture, which effectively resolves the issue by combining drive and control functions within a single framework.
This means the system can process commands more directly and execute actions with extremely fast response times. This is a significant advantage for actions such as picking, following, and tracking. It enables the Cartesian coordinate robot to react immediately upon signal arrival, thereby better aligning with the molding cycle.
In injection molding, there is no need to waste time waiting for the internal control logic layer to respond. By shortening the command path, the Cartesian coordinate robot operates faster, more efficiently, and is more reliable in continuous production.
Zero-Latency Execution of Pick-and-Place and Tracking Movements
In repetitive manufacturing, a Cartesian coordinate robot may perform the same sequence of operations hundreds or even thousands of times a day. Even the slightest delay in each operation can result in cumulative losses. Over time, these delays reduce production efficiency and cause timing mismatches with the injection molding machine. When the robot can respond instantly, the entire production rhythm becomes more stable.
The integrated drive control architecture supports near-zero-latency execution of critical actions such as picking, placing, path tracking, and follow-up movements. This allows Cartesian robots to interpret commands without delay, begin motion almost immediately, and maintain a smoother transition between signals and actions.
High-Precision Closed-Loop Control for Repeatable Motion
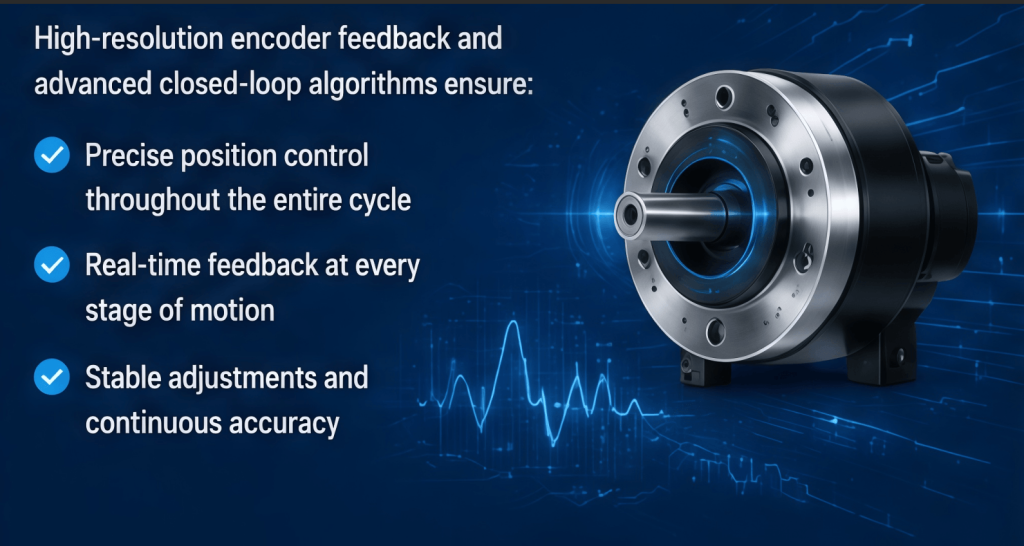
To achieve higher precision, we combine high-resolution encoder feedback with advanced closed-loop algorithms.
Cartesian injection molding robots handling precision inserts or optical components must maintain precise position control throughout the entire cycle. If position data is incomplete or delayed, the robot may deviate from the target position. High-resolution feedback helps prevent this by allowing the system to know its actual position at every stage of motion. This continuous feedback is also critical for pick-and-place and tracking tasks. In production, this also provides a more reliable foundation for the Cartesian robot’s precision operations, enabling it to adjust and move with greater stability continuously.
Achieving a repeatability of ±0.01 mm for the Cartesian coordinate robot
An integrated drive control architecture, combined with high-precision closed-loop control, high-resolution encoder feedback, and advanced closed-loop algorithms, enables Cartesian coordinate robots to achieve ±0.01 mm repeatability. Compared to general-purpose handling units, Cartesian coordinate robots with this level of precision are better suited for demanding production lines. Examples include precision inserts, optical components, and other high-precision parts. By maintaining repeatability within ±0.01 mm, Topstar provides users with a more stable and predictable automation platform. The robot does not merely move; it repeatedly executes high-precision actions.
Integrated Drive-and-Control Architecture Enables Latency-Free Motion Execution
Cartesian coordinate robots can only optimize pick-and-place and tracking motions when the control architecture supports the entire process at every level. By integrating the drive and control systems, the robot responds more quickly. Combined with high-resolution encoder feedback and advanced closed-loop algorithms, it achieves repeatability of ±0.01 mm, better meeting the high standards of pick-and-place requirements for precision inserts, optical components, and similar applications.
TRENDING POSTS
- How does a compact dehumidifying dryer achieve stable and reliable drying and dehumidification? 2026/05/11
- CHINAPLAS 2026 is Coming Soon! 2026/05/11
- New Year, New Beginnings: Topstar Robotics Delivers Heartfelt Service to Keep Customers Thriving! 2026/05/11
- TOPSTAR Global Open Day 2025: Humanoid Robot Debuts, Pioneering a New Decade of Intelligent Manufacturing 2026/05/11
HOT TOPIC
- .ervo motor-driven linear robots
- •
- 1.0 guangdong topstar technology co. ltd
- 1.0 topstar china
- 1.0 topstar robot
- 11
- 160℃ mold temperature controller
- 170 ton injection molding machine
- 2
- 21
- 220-ton injection molding machine
- 23
- 260 ton injection molding machine
- 3 axis robot
- 3 axis robots
- 3 in 1 Compact Dehumidifying Dryer
- 3-axis robot
- 3-axis robots
- 39
- 4 axis robot
- 4-axis SCARA robot
- 41
- 460T injection molding machine
- 5-axis CNC machine
- 62
- 90 ton injection molding machine
- accuracy
- Air Chillers
- air-cooled chillers
- all electric injection molding machine
- all electric injection molding machines
- all-electric injection molding machine
- All-electric injection molding machines
- and overall production quality. Therefore
- AP-RubberPlas
- auto cooling system
- auto loader
- Auto Loaders
- automated injection molding machine
- Automation changed engineering
- automation of injection molding robots
- automotive parts injection molding
- Auxiliary Equipment
- auxiliary machine
- Bench Injection Molding Machine
- cabinet dryer
- Cabinet dryer manufacturers
- Cabinet dryers
- cartesian coordinate robot
- Cartesian Coordinate Robots
- Cartesian injection robot
- Cartesian robot
- Central Feeding System
- chiller
- CNC Drilling Machine
- CNC Drilling Machines
- cnc engraving machine manufacturer
- cnc laser cutting machine manufacturer
- CNC machine
- CNC Machine Center
- CNC Machine for Sale
- CNC Machine Manufacturing
- CNC Machine Tool
- CNC machine tool product
- CNC Machining Center
- CNC wood carving machine
- Compact Dehumidifying Dryer
- Cooling system
- Cross-Walking Single Axis Servo Cylinder Robot
- Cross-Walking Single-Axis Servo Cylinder Robot
- Cross-Walking Three-Axis/Five-Axis Servo Driven Robot
- cross-walking three-axis/five-axis servo-driven robot
- Dehumidifier Dryer
- Dehumidifying Dryer
- dehumidifying dryers
- delta parallel robot
- Desktop Injection Molding Machine
- Desktop injection molding machines
- Desktop Molding Machine
- desktop plastic injection machine
- Desktop Plastic Injection Molding Machine
- Digital Transformation
- direct clamp injection molding machine
- Direct clamp injection molding machines
- Dosing & mixing system
- Drilling Centers
- Drying and dehumidification system
- drying and dehumidifying equipment
- Drying and Dehumidifying System
- drying system
- effective and efficient. Cabinet dryers are also used in other industries where large quantities of material need to be dried
- efficient injection molding machine
- elbow hydraulic injection molding machines
- electric injection molding machine
- electric injection molding machines
- energy-efficient injection molding robot
- energy-efficient water chiller
- energy-efficient water chillers
- energy-saving injection molding machine
- etc. Among injection molding robots
- exhibition
- features of CNC machine
- Feeding And Conveying System
- Five Axis Machine Center
- Flexible Production Line
- Fully automatic injection molding machine
- Gathering Topstar
- giant injection molding machine
- GMU-600 5-Axis Machining Center
- Granulating & Recycling System
- granulator machine
- gravimetric blender
- Heavy duty injection molding machine
- High-precision electric molding machines
- high-precision plastic molding machines
- high-speed all electric injection molding machine
- high-speed electric injection molding machine
- High-Speed Packaging Injection Molding
- Honeycomb rotor dehumidifier
- hopper dryer
- Hopper Dryers
- horizontal injection molding machine
- Horizontal Injection Molding Machines
- Horizontal Injection Moulding Machine
- Horizontal Mixer manufacturer
- How The CNC Machine Works
- hybrid injection molding machine
- hydraulic injection molding machine
- Hydraulic Injection Molding Machines
- in this article
- Industrial AI
- Industrial Automation
- Industrial robot
- Industrial Robot Chinese brand
- industrial robot parts
- industrial robot supplier
- Industrial robots
- Industry Chain
- Injection Manipulator
- injection manipulator robot
- injection mold machines
- Injection molding
- Injection molding automation
- Injection Molding Automation Solution
- injection molding dryer
- Injection molding equipment
- injection molding hopper dryer
- Injection molding machine
- injection molding machine brand
- Injection Molding Machine Factory
- Injection Molding Machine Manufacture
- Injection molding machine manufacturer
- injection molding machine manufacturers
- Injection molding machine procurement
- injection molding machine robotic arm
- injection molding machine with a robot
- Injection molding machines
- injection molding material dehumidifying
- injection molding plant
- injection molding process
- Injection Molding Robot
- injection molding robot arm
- Injection molding robot automation
- Injection molding robotic arm
- injection molding robots
- injection molding whole plant
- injection moulding dryer
- Injection moulding machine
- injection moulding machines
- Injection Moulding Robots
- Injection Robot
- Injection robot arm
- Injection robot manufacturer
- Injection robot wholesale
- injection robots
- Intelligent Factory
- intelligent injection molding machines
- Intelligent Manufacturing
- intelligent mold temperature
- intelligent mold temperature controller
- Intelligent mould temperature controller
- intelligent whole plant solution
- InterPlas Thailand 2025
- Introducing Injection Robot
- It is the best choice for drying large quantities of material at once. Cabinetmakers use these machines because they are fast
- Large flow water type mold temperature controller
- large injection molding machine
- large injection molding machines
- Learn what industrial automation and robotics is
- linear robot
- linear robots
- low speed sound-proof granulator
- machine plastic molding
- make sure to add some! Improvements (2) Keyphrase in introduction: Your keyphrase or its synonyms appear in the first paragraph of the copy
- manipulator machine
- manufacturing
- Manufacturing Innovation
- medical grade injection molding machines
- Medical Injection Molding
- medical injection molding machine
- medical injection molding machines
- micro injection molding machine
- middle speed granulator
- Mini CNC machine manufacturers.
- mobile cover making machine
- Mold Temperature Control System
- mold temperature controller
- mold temperature controllers
- molding machine
- molding material Dehumidifying System
- mould temperature control system
- mould temperature controller
- mould temperature controller
- mould temperature controllers
- New electric injection molding machine
- nitrogen dryer manufacturer
- nitrogen dryer system manufacturer
- Oil type mold temperature controller
- Oil type mold temperature controllers
- open day
- optical component injection molding
- Outbound links: No outbound links appear in this page. Add some! Images: No images appear on this page. Add some! Internal links: No internal links appear in this page
- packaging injection molding
- Packaging Solutions
- PET Preform injection molding
- phone case maker machine
- phone case making machine
- phone cover making machine
- PID Control Mold Temperature Controller
- plastic auto loader
- plastic bottle making machine
- plastic bottle manufacturing
- plastic bucket making machine
- plastic bucket manufacturing
- Plastic chair making machine
- plastic dryer for injection molding
- plastic forming equipment
- Plastic Granulators
- plastic hopper dryer
- plastic injection machine
- plastic injection machines
- plastic injection molding
- Plastic injection molding equipment
- Plastic injection molding machine
- Plastic Injection Molding Machines
- plastic injection moulding machine
- plastic injection moulding machines
- plastic injection robot
- plastic molding
- Plastic Molding Industry
- Plastic Molding machine
- plastic molding machine 1
- Plastic Molding Machines
- plastic molding press
- plastic moulding machine
- plastic phone case making machine
- plastic-molding machine
- powerful granulator
- Powerful Type Sound-Proof Granulator
- precision injection molding
- precision injection molding machines
- production of plastic seats
- pure water mould temperature controller
- Robot injection molding
- robot injection molding machine
- robot manufacturing companies
- Robotic arm for injection molding machine
- robotic injection molding machines
- robotics in injection molding
- SCARA robot
- SCARA robots
- Screw dosers
- Service-oriented manufacturing
- Servo Cylinder Robot
- servo driven robot
- Servo Driven Robots
- servo injection molding machine
- servo injection robots
- servo motor-driven linear robots
- servo-driven 3-axis robot
- Servo-driven injection molding machine
- Servo-Driven Robot
- Setup of injection machine
- Silicone Injection Molding Machine
- six-axis industrial robot
- Smart Manufacturing
- soundproof granulator
- Sprue Picker
- Stainless Hopper Dryer
- Stainless Hopper Dryers
- star club
- swing arm robot
- take-out robot
- take-out robots
- Thailand 4.0
- the choice between servo-driven robots and hydraulic robots will have a certain impact on efficiency
- the most popular injection molding machine
- the type of injection molding robot
- TIC2000 Control System
- TMII injection molding machine
- toggle clamp injection molding machine
- Toggle Hydraulic Injection Molding Machines
- toggle injection molding machine
- Top 10 brands of injection robots
- Topstar
- Topstar Electric Injection Molding Machine InterPlas Thailand 2025 Smart Manufacturing Thailand 4.0
- Topstar Engineering
- Topstar Industrial Robots
- Topstar injection molding intelligent
- Topstar Scara Robots
- Useful Injection molding machine
- Vertical machining centers
- volumetric type blender
- Washing Machine Case Molding Solution
- water chiller
- water chillers
- water distributor
- water type mold temperature controller
- Water Type MoldTemperature Controller
- Water-cooled Mold Temperature Controller
- water-type mold temperature controller
- Water-Type Mould Temperature Controllers
- We often face choices when performing injection molding. We will choose the type of injection molding machine
- wholesale of injection molding machines
- x carve CNC
- 热门查询 点击次数 展示 排名 topstar